Az orvosi robotika a világ minden részén a vezető témák közé tartozik. Hazánkban az Óbudai Egyetem Bejczy Antal iRobottechnikai Központja (BARK) a robotikai kutatások fellegvára. Takács Árpád, a BARK doktorjelöltje és munkatársa korábban a BME mechatronika, majd gépészeti modellezés szakon szerzett diplomát. Itt találkozott először időkésleltetett rendszerekkel. Tanulmányait a távsebészet, illetve a sebészeszközök és a szövet kölcsönhatásának kutatásában hasznosítja. Arról beszélgettünk, milyen tudományos és gyakorlati alkalmazásai vannak, de még inkább lesznek ezeknek a vizsgálatoknak.

– Honnan ered az érdeklődése a robotika iránt?
– Gyerekkorom óta elbűvöl. Szabadkán születtem és ott is nőttem fel. Amikor jó volt az idő, a biciklimmel tartottam rettegésben az utca népét, rossz idő esetén pedig a szobámban legóztam. Tízéves lehettem, amikor az első lego-motorkészletet megkaptam. Ennél már figyelnem kellett arra is, hogyan kapcsolódnak egymáshoz a mozgó alkatrészek. Ahhoz ugyanis, hogy minden kifogástalanul működjön, nem volt mindegy, milyen elemeket teszek egymás mellé. Érdekelt a matematika és fizika, de én egy gyakorlatiasabb témakörrel szerettem volna foglalkozni, ami ezekre épül. Ez volt a robotika. Így, a BME-re jelentkeztem mechatronikára, és a mesterképzésen váltottam gépészeti modellezésre. Egy nagyon kedves barátom egyszer azt mondta, mindig lesznek mérnökök, akik jobb belsőégésű motorokat vagy fényképezőgépeket terveznek majd. Mi foglalkozzunk inkább valami olyannal, amivel közvetlenül is segíteni tudunk az embereken. Ez a gondolat nagyon megfogott. Ezért is választottam a sebészrobotokat PhD-témaként.
– Milyen kutatásokat tud végezni ebben a témában itthon?
– A mai sebészrobotok nem maguk végzik a műtéteket, hanem általában a sebész mozdulatait utánozza le a robotkar. Mivel a sebész egy külső konzolnál foglal helyet, a műtét során gyakran csak képi visszajelzést kap egy képernyőn, és nincs információja arról, hogy milyen erősen rángatja a szöveteket. Pedig fontos lenne a megbízható erővisszajelzés, hiszen enélkül többet árthatunk a páciensnek, mint amennyit segíthetünk. Továbbá, hogy ha valamilyen automatizált folyamatot szeretnénk véghezvinni, meg kell ismernünk, hogyan viselkedik az anyag, amellyel dolgozunk. Már az sem egyszerű történet, hogyan tud megfogni egy kemény tárgyat egy robotkar, nem is beszélve egy törékeny műanyag pohárról. Az emberi szövet is különleges. Másképp viselkedik, ha egyik vagy másik irányból húzom, ha kétszer egymás után megnyomom, és sokszor azt sem tudjuk, hogy az erek hogyan befolyásolják a mechanikai viselkedést. Én egy olyan mechanikai szövetmodell létrehozásán dolgozom, amely valósághű visszacsatolást tud adni arról, hogy a sebész milyen erősséggel manipulálja a szövetet, anélkül, hogy azt közvetlenül mérnénk.
– Ugyanazon személyen se mindig egyforma a bőr reakciója: hideg van, meleg van, izgul, mert műtik, fél a robottól stb. Hogyan tudják ezt megoldani?
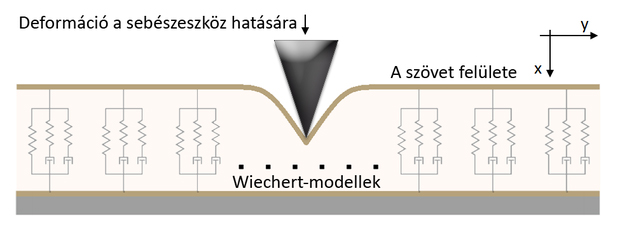
– Az emberi szövet viselkedését tömeg–rugó–csillapítás elemekkel, más néven rheológiai modellekkel közelítjük meg. Kicsit olyan ez, mint az autók lengéscsillapítója. Tudjuk, hogy az autó rugózik, ha átmegy egy fekvőrendőrön, de a rugózás lecsillapodik. Ha az elemeket megfelelően kombináljuk egymással – és erre vannak tradicionális módszerek –, akkor különböző biomechanikai folyamatokat tudunk modellezni. Ilyen például a feszültség, relaxáció vagy kúszás. Ha megnyomom a bőrt, akkor előbb-utóbb csökkeni fog az erőhatás, mert a szövetek visszarendeződnek. Ennek a jelenségnek a matematikai leírására hoztam létre egy szövetmodellt, melynek paramétereit különböző szövetekre meghatároztam. A különböző típusú szövetek tulajdonságai bizonyos határokon belül mozognak, és ez a bizonyos határ pont elég ahhoz, hogy jó közelítést tudjunk adni az erőválaszra. A modell elkészült, és a kísérletek azt mutatták, hogy nagyon jól le tudja írni, hogyan fog viselkedni a szövet, ha különböző erővel különböző mélységig megnyomkodom.
– Hogyan tesztelték a modellt?
– Ma a da Vinci Surgical System a legelterjedtebb távsebészeti rendszer a világon. A da Vinci Research Kit ennek egy nyílt forráskódú fejlesztőkörnyezete, ami megtalálható nálunk is az egyetemen. Ezzel azt vizsgáltuk, mennyire lehet megkülönböztetni a valós szövetet egy virtuális, a modell alapján felépített szövettől. A résztvevőknek hat virtuális modellt mutattam, különböző paraméterekkel. A kísérletezők 35%-a találta el, hogy melyik a valós szövet modellje, 60% pedig arra a mesterséges szilikonmodellre szavazott, melynek a mechanikai tulajdonságai nagyon hasonlítanak a valós szövet mechanikai tulajdonságaira. Ez azt is mutatja, hogy mesterségesen előállított szilikonanyagokkal is elég jól lehet helyettesíteni a valós szövetet, például sebészek képzésénél és tréningeknél.
– Az így nyert tapasztalatok alapján merre lehet vagy merre szeretnének indulni?
– Az egyik izgalmas és fontos irány annak vizsgálata, hogy mi történik, ha elkezdem a paramétereket lerontani, ha nő az időkésés vagy egyéb robusztussági vizsgálatokat végzek.
A távsebészet mint koncepció a NASA-nál jelent meg még a ’70-es években. Szerették volna, ha egy egész orvoscsoport helyett csak egy robot menne az űrhajósokkal a Holdra vagy a Marsra, és ha valami baj van, a Földről tudnak távoperálni. De már a Holdnál is 2 és fél másodperc a jel késése, ami már túl sok ahhoz, hogy biztonságosan lehessen elvégezni egy beavatkozást. Már maga a koordináció is elég nehéz, és ha elvágunk egy eret és csak két és fél másodperc után vesszük észre, az nagy baj. A késleltetett teleoperáció körülbelül fél másodpercig működik jól, ami viszont tartható földi körülmények között. Az ilyen beavatkozások stabilitását az időkésés növelése veszélyeztetheti, de egy jó eszköz–szövet interakciós modellel a robusztusság és minőség növelhető.

(TRUPKA ZOLTÁN FELVÉTELE)
A közeljövőben érdemes lenne megvizsgálnunk, hogyan lehet ezt a megközelítést integrálni egy olyan virtuális rendszerbe, ami felhasználja a szövetmodelleket, vagy hogyan lehetne bizonyos folyamatokat automatizálni olyan esetekben, mint a sebek összevarrása vagy az erek „elsütése”, hogy ne vérezzenek a beavatkozás során az adott szerv körül. A vágás is belekerülhet a rendszerbe, mint új típusú manipuláció. És mindezt meg lehetne támogatni mesterséges intelligenciával. Van is egy hallgatónk, aki éppen azon dolgozik, hogyan tudná ezt integrálni a da Vinci-rendszerbe.
– Hol a helye ezeknek a kutatásoknak itthon és a nagyvilágban?
– Tagjai vagyunk egy olyan nemzetközi kutatóközösségnek, amely a világ legnevesebb mérnöki egyetemeit tudja maga mögött. A tudástranszfer, a tapasztalatcsere nagyon sokat hozzá tud tenni ahhoz, hogy ezek a sebészrobotikai rendszerek fejlődjenek. Ez azt is jelenti, hogy az itthoni fejlesztések egyben nemzetközi szintűek is. Ez a téma Magyarországon csak néhány évvel ezelőtt lett népszerű, a sebészrobotika fogalma korábban nem is nagyon volt ismert. Ezt az új irányt igyekszünk mi is népszerűsíteni. Nagyon sok kórházzal, egészségügyi intézménnyel van kapcsolatunk. Próbáljuk megismertetni a rendszert orvosokkal, sebészekkel, mérnökökkel. Így némi társadalmi szolgálatot is teszünk, hogy elfogadottabb legyen az ember–robot kapcsolat. Az emberek egy része még tart a robotoktól, ami természetes, míg nem ismerik működésüket. Mindenesetre a hallgatók között egyre nagyobb az érdeklődés. Jelen pillanatban felfutó ágban vagyunk. Egyelőre inkább kutatási, mint klinikai oldalról, ám utóbbi sincs már távol.
TRUPKA ZOLTÁN
2017/4