
Az önvezető autózás kétségtelenül napjaink egyik legnépszerűbb kutatási témája, egyben a műszaki alaptudományok legaktívabb határterülete. Az önvezető autók mint robotikai rendszerek feladata az emberi autóvezetés összetett folyamatának kiváltása. Mindeközben hatalmas mérnöki kihívásokkal kell szembenéznünk, így például a pontos érzékeléssel, biztonságos döntéshozatallal és robosztus szabályozással. Míg a ma létező prototípusok bizonyos feladatokat és funkciókat hibátlanul demonstrálnak, még hosszú évekre vagyunk attól, hogy kormány és pedál nélküli járműveket vásárolhassunk az autókereskedésekben. Ennek nem csupán műszaki akadályai vannak – hiszen a technológia maga néhány éven belül ténylegesen rendelkezésre áll majd –, hanem a folyamatosan változó és fejlődő törvényi szabályozások és az autóipar (és piac) lassú alkalmazkodása is jelentősen közrejátszanak.
Nem véletlen, hogy pont az önvezető autózást emelte ki a társadalom a már-már tudományos-fantasztikus regényekbe illő kutatások közül. A mobilitás a civilizáció hajnala óta a globális fejlődés és jólét előfeltétele, így volt ez a kerék, a gőzgép vagy éppen a repülés esetében is. A társadalmi nyomás pedig óriási: évente több mint egymillióan vesztik életüket közúti balesetekben világszerte, a balesetek 90%-át pedig emberi mulasztás okozza. Ha naponta 10 darab Boeing 747 utasszállító zuhanna le, csak megközelíteni tudnánk ezt a számot, bolygónk egymilliárd gépjárműje mellett mégis sokszor jelentéktelennek tűnik egy-egy komolyabb közúti baleset. Mindezek ismeretében azonban a világszerte megspórolt napi egymilliárd órányi idő, a szén-dioxid-kibocsátás csökkenése a hatékony vezetéstervezés hatására, illetve a technológia által biztosított kényelem mind másodlagos érték az önvezető autók által nyújtandó biztonság mögött.
Az önvezető autózás kérdése az autók hőskora óta foglalkoztatta az embereket. Az amerikai Pontiac autógyár már az 1920-as években bemutatta fantomautóit, melyek vezető nélkül járták az utakat – természetesen távirányítós üzemmódban, a rádiótechnika által kínált lehetőségeket demonstrálva. Az első igazi, számítógéppel vezérelt autókra egészen a nyolcvanas évekig kellett várnunk, ugyanakkor a kétezres évek elejéig egy nagyobb méretű furgonra volt szükség a számítási egység hordozására. Az áttörést a kaliforniai DARPA Challenge versenyek hozták, ahol előre meghatározott feladatok elvégzésére számos egyedi autót hoztak létre egyetemi és ipari szereplők. Nem túlzás, hogy érzékelők tucatjai, ezen belül méregdrága LIDAR lézeres eszközök feleltek a környezet felismeréséért, ugyanakkor a versenysorozattal az önvezető autózás új korszaka indult, mely számos, ma is alkalmazott ötletet, algoritmust és elismert szakembert adott a világnak.
Algoritmusok és neurális hálók
A rendelkezésre álló számítási kapacitásnak és dinamikusan fejlődő algoritmusoknak köszönhetően a kamerák fokozatosan veszik át az elsődleges érzékelők szerepét az autókban. A mai fejlett vezetéstámogató funkciók, így például a sávtartáshoz és a gyalogosok érzékelésére használt algoritmusok is kameraképek alapján dolgoznak, azonban a gyártásban kizárólag hagyományos gépi látással talál-kozhatunk. Az önvezető autózás viszont több egyszerű sávtartásnál, így egyre nagyobb népszerűségnek örvendenek a modern mély tanulást (Deep Learning, DL) és neurális hálókat (Neural Networks, NN) alkalmazó algoritmusok, a mesterséges intelligencia (AI) alapú önvezetés elengedhetetlen komponensei.
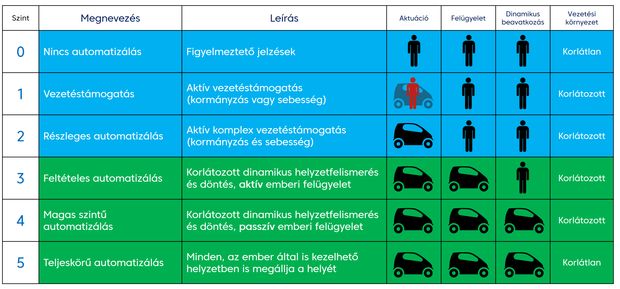
Az egyes prototípusok képességeinek definiálása hozta létre az Autóipari Mérnökök Egyesülete (SAE) az autonóm vezetés hatszintű táblázatát, mely egyben az önvezető autók köré rendeződő fejlesztési és kutatási irányokat is meghatározza. A lista 0-2. szintje a vezetéstámogató rendszereket (ADAS) fedi le, melyek az emberi sofőrök mindenkori teljes figyelmét és döntéshozatalát igénylik, míg a 3-5. szinten a környezet felismerése, értelmezése, a döntéshozatal és végrehajtás már a számítógép feladata. Ennek megfelelően – bár éles technológiai határok nem definiálhatók –, ökölszabályként elmondható, hogy a 0-2. szintek hagyományos algoritmusokkal megoldhatók, jelenleg a piacon elérhető hardveres támogatás mellett, míg a 3-5. szintek esetében a mesterséges intelligencia megkerülhetetlen. És míg az autógyárak és autóipari beszállítók nagy része a biztonságos, fokozatos utat választja a fejlődés irányába (ma legfeljebb 2. szintű önvezető autót vehetünk a márkakereskedésekben), gombamód szaporodnak azok a technológiai vállalatok és kisebb szoftvercégek, akik a grandiózus 5. szint elérésén dolgoznak már a kezdetektől.
A fejlesztés építőelemei
A fejlesztési irányok sokszínűségét mi sem mutatja jobban annál, minthogy az elmúlt években többezer fős autóipari fejlesztőközpontok, néhány tucat fős garázscégek, de még magányos farkasok is mutattak be látványos funkciókat, netán ígéretes prototípusokat. Ahhoz azonban, hogy valós, 5. szintű önvezető rendszerek jöhessenek létre, technológiai szempontból három jól elkülöníthető építőelemre van szükség.
Algoritmusok – az önvezetés elképzelhetetlen olyan alkotóelemek nélkül, melyek egy autófüggetlen, integrált szoftveres keretrendszert szolgálnak ki. Feladatuk az érzékelők összehangolása, az adatfeldolgozás, a felismerés, hely(zet)meghatározás, döntéshozatal és irányítás. Így, bár a fejlesztések a szélrózsa minden irányába elindultak, a percepció–lokalizáció–tervezés hármasa minden rendszerben megjelenik. A hagyományos algoritmusok még ma is gyakran szélmalomharcot vívnak a mesterséges intelligencia alapú megközelítésekkel, ugyanakkor ma már a kutatók álláspontja szerint a megoldás valahol a kettő megfelelő egyensúlyát követeli majd meg. Nem kódolhatunk be minden lehetséges közlekedési helyzetet kézzel, ugyanakkor nem engedhetjük meg az autónak azt sem, hogy minden kereszteződésnél önkényesen döntsön. Ez utóbbi megközelítés népszerű példája a fekete doboz-szerű, úgynevezett end-to-end learning, ahol a mesterséges intelligencia csupán az emberi vezetést figyelve, próba-szerencse módon tanul meg közlekedni egy virtuális környezetben. Bár számos ígéretes kutatási eredményt született már az elmúlt években, minőségbiztosítási és hibakeresési szempontból nem valószínű, hogy a jövőben az ilyen rendszerek sorozatgyártásba kerülnek. Robusztusabb, ugyanakkor összetettebb megközelítés, ha az emberi vezetést vizsgálva egy önvezető szoftver építőelemeit hozzuk létre. Ezek hierarchikusan épülnek egymásra, feladatuk pedig az információszolgáltatás a környezetről, a jármű-környezet kölcsönhatásról és az optimális útvonalról – mindezt nem a mesterséges intelligencia által, hanem annak támogatásával megvalósítva.
Fejlesztési eszközök – az autóiparban évtizedekkel ezelőtt kialakult beszerzési lánc felépítése lehetővé teszi, hogy az autógyártók elsődleges feladata a motorfejlesztés mellett a kész, független komponensek integrációja legyen. A komponenseket általában első szintű autóipari beszállítók fejlesztik, melyek további beszállítóktól nyerik a feldolgozóegységeket, algoritmusokat stb. Ennek köszönhetően a mai autók mind a funkciókat, mind a felépítésüket tekintve elosztott rendszerek, egy autóban akár 150 mikroprocesszor is helyet kap. A jövő autói az elosztottság ilyen mértékű luxusát nem engedhetik meg maguknak, hiszen minden egységnek harmóniában kell működnie, így a fejlesztések egyértelműen egy központosított rendszer irányába mutatnak. Ennek természetes következménye, hogy az egyes komponensek szimultán fejlesztése és kölcsönhatásuk folyamatos tesztelése az önvezető autók fejlesztésének integrált részévé vált, és egyre több olyan fejlesztési eszközzel találkozunk mind az autógyártók, mind a kisebb technológiai cégek körében, melyet jobb híján „házon belül” kell kifejleszteni. Ezek elsősorban az adatfeldolgozás (gyűjtés, címkézés, előállítás, javítás), szoftveres keretrendszerek (mesterségesintelligencia-tanítás, szenzorfúzió, kódoptimalizálás) és tesztkörnyezetek (verifikáció, minőség-ellenőrzés, szimuláció) formájában valósulnak meg.

Számítási kapacitás – ma már közhelynek számít, hogy másfél évente a rendelkezésre álló számítási kapacitásunk megduplázódik. Ugyanakkor ennek a mindennapi életben lényegesen kisebb jelentőséget tulajdonítunk, mint tíz éve, és elfogadjuk, hogy ma már az adatfeldolgozásnak nincsenek határai. A neurális hálókkal támogatott mesterséges intelligencia gyakorlati alkalmazására azonban ez nem érvényes. Míg az egyes algoritmusok teljesítményét alulról a minőségi, pontossági és megbízhatósági követelmények határolják, összetettségüket felülről a futtatáshoz szükséges energia korlátozza. A mai algoritmusok jelentős része konvolúciós neurális hálókat (CNN) alkalmaz, melyeket mind a tanítási, mind a futtatási fázisban napjainkban a grafikus processzorok (GPU-k) kezelik a leghatékonyabban. Egy átlagos önvezető prototípusban az ilyen processzorok által felvett teljesítmény akár az egy kilowattos álomhatárt is átlépheti, mely elfogadhatatlan egy sorozatgyártott autó esetében. A célhardver fejlesztése tehát elengedhetetlen az önvezető autózás területén. A feladat kristálytiszta: egy olyan processzor létrehozása, mely hatékonyan futtat neurális háló alapú algoritmusokat, növeli a feldolgozóegységek teljesítménysűrűségét, és amely megfelel a mindenkor hatályos autóipari biztonsági és minőségi szabványoknak.
Társadalmi megítélés
Ahogyan az önvezető autózást támogató technológiák egyre szélesebb körben érhetők el, a jövő felhasználói minél többet szeretnének majd megtudni azok működési elvéről és arról, hogy hogyan változtatják meg életüket az utakat hamarosan meghódító önvezető flották. A mesterséges intelligencia alapú algoritmusok évek óta elengedhetetlen eszközei diagnosztikának, előrejelzéseknek és döntéshozatalnak – elsősorban a pénzügy, reklámipar és orvostechnika területén -, ugyanakkor az önvezető autózás az első olyan globális alkalmazásuk, mely biztonságkritikus rendszerek irányításáért felel.
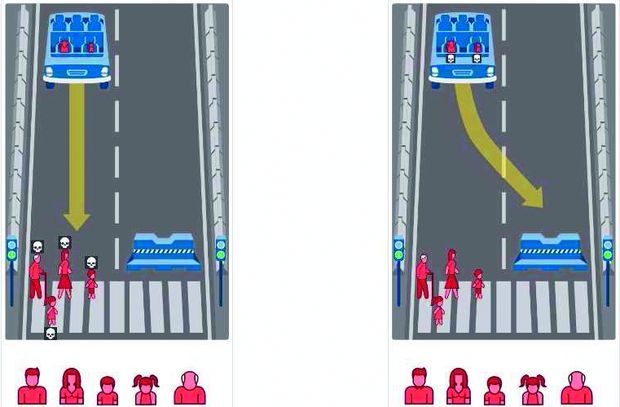
Napjaink egyik leghevesebb etikai vitáját váltotta ki a kérdés, hogy az önvezető autók hozhatnak-e majd morális döntéseket, illetve egyáltalán képesek lesznek-e erre. A viták többsége egyenes ágon vezethető vissza a klasszikus villamosdilemmára. A népszerű példában egy fékezhetetlen villamost irányítunk, és etikus döntést kell hoznunk arról, hogy egy váltó átváltásával feláldozzunk-e egy ártatlan életet öt másik megmentéséért cserébe. A dilemma az orvosi etika egyik legrégebben oktatott és hivatkozott kérdése, a deontológiai és utilitarista filozófia irányzatok szembeállítása – nem az önvezető autózás szülötte, a társadalom mégis most érzi először magáénak igazán. Egyetemi kutatások és világszintű felmérések bizonyították már az emberek megosztottságát a kérdésben, és bár az autógyártók nagy része már nyíltan állást foglalt egy-egy oldal mellett, technológiai szempontból semmi sem utal arra, hogy a döntéshozatali algoritmusok rákényszerülnének morális döntések meghozatalára. Mérnöki szemmel ez megkönnyebbülés, hiszen így a funkciók létrehozása és fejlesztése elsőbbséget élvez, mely már rövid távon is mérhetően biztonságosabb és hatékonyabb mobilitást eredményez majd.
TAKÁCS ÁRPÁD
2018/3

